+86-13073105066
admin@longshubearing.com







제품































로봇 및 조작기용 베어링
로봇 베어링은 산업용 로봇의 핵심 부품입니다. 주로 매니퓰레이터 조인트, 회전 장치 및 정밀 회전 테이블에 사용됩니다. 이들 특성은 로봇의 원활한 작동, 반복 가능한 위치 지정 및 작동 신뢰성에 직접적인 영향을 미칩니다.
설명
마커
제품 설명
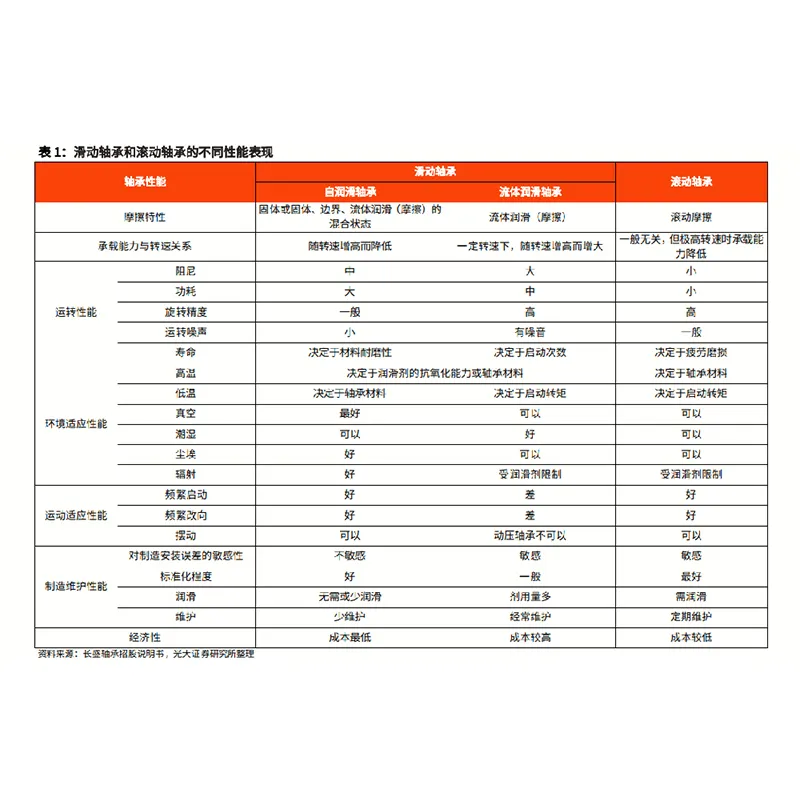
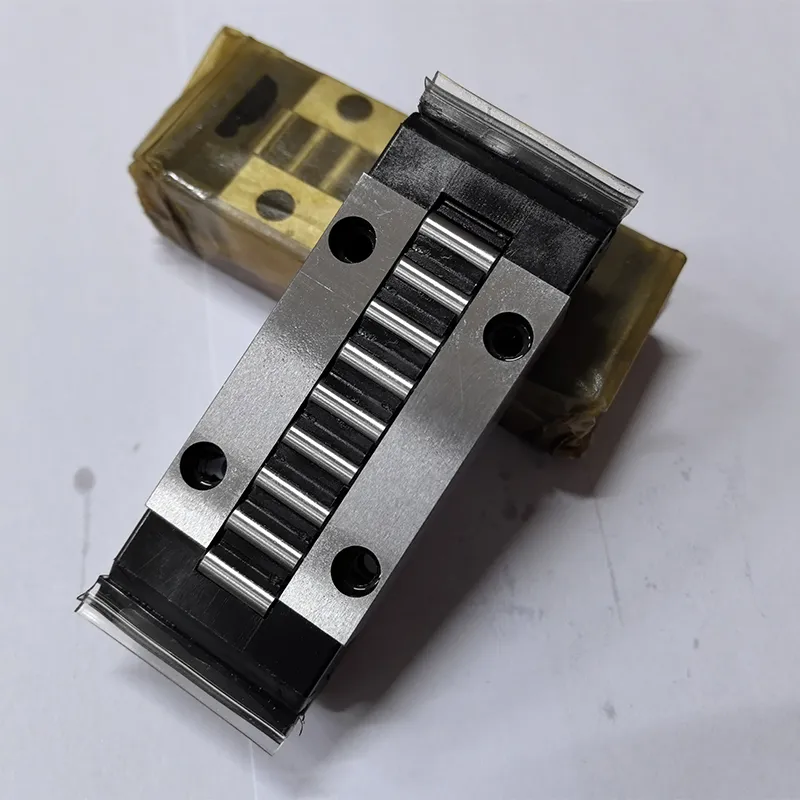
로봇 베어링은 산업용 로봇의 핵심 부품입니다. 주로 매니퓰레이터 조인트, 회전 장치 및 정밀 회전 테이블에 사용됩니다. 이들 특성은 로봇의 원활한 작동, 반복 가능한 위치 지정 및 작동 신뢰성에 직접적인 영향을 미칩니다. 주요 유형에는 크로스 롤러 베어링, 얇은 벽 베어링, 웨이브 기어 베어링 및 일반 베어링이 포함됩니다. 그 중에서 크로스롤러 베어링은 경방향 하중과 축방향 하중은 물론 전도 모멘트도 동시에 흡수할 수 있기 때문에 선두 위치를 차지하고 있습니다. 일부 제품은 성능을 향상시키기 위해 질화 규소 세라믹 비드 및 표면 마감 처리와 같은 기술을 사용합니다.
산업용 로봇 베어링은 주로 얇은 벽 등가 베어링, 크로스 롤러 베어링, 웨이브 기어 베어링, 일반 베어링, RV 기어 베어링, 전기 모터 베어링 및 리드 스크류 베어링으로 구분됩니다.
디자인 기술
산업용 로봇의 구성 요소인 베어링의 설계 원리는 공칭 동적 하중 용량, 강성 및 마찰 모멘트의 세 가지 지표를 객관적인 함수로 사용하는 다중 기준 최적화를 제공해야 합니다. 주요 기술로는 구름 접촉 이론, 동적 하중 해석, 열 해석 및 신뢰성 평가가 있습니다. 구름 접촉 이론은 구름 표면의 접촉 응력과 변형 거동을 설명하므로 베어링의 피로 수명과 하중 지지 능력을 예측할 수 있습니다. 동적 하중 분석은 동적 하중 조건에서 베어링의 성능을 모델링합니다. 열 분석을 사용하면 베어링의 온도 분포와 열 응력을 예측하여 고온에서의 안정성과 신뢰성을 보장할 수 있습니다. 확률모델과 통계분석을 기반으로 한 신뢰성 평가를 통해 잠재적인 고장을 예측하고 예방할 수 있습니다.
제조기술 및 정밀가공
로봇 베어링 생산을 위한 핵심 기술은 다음과 같습니다. 벽이 얇은 베어링의 음의 틈새를 정밀하게 제어하는 기술; 벽이 얇은 앵귤러 콘택트 볼 베어링의 장착 높이 제어; 얇은 벽 베어링 조립 기술; 벽이 얇은 베어링 링의 내경과 외경을 비접촉식으로 측정하는 기술입니다. 특정 공정에는 연삭 작업 경화층 제어를 기반으로 베어링 링을 미세 연삭하는 기술도 포함됩니다. 베어링의 잔류 응력을 60%까지 감소시키는 열간 등압 성형; 통제된 분위기에서 경화되어 0.02mm 이내의 변형 제어를 보장합니다.
")
")
")
")
저희에게 연락주세요
관련 인기 제품

SKF 브랜드 베어링
수입 베어링은 중국산 베어링과 대조되는 개념이다. 수입 베어링은 강력한 브랜드 지원, 첨단 과학 개념 및 혁신을 제공할 뿐만 아니라 완벽한 애프터 서비스와 강력한 제품 범위 확장도 제공합니다.

INA 브랜드 베어링
수입 베어링은 중국산 베어링과 대조되는 개념이다. 수입 베어링은 강력한 브랜드 지원, 첨단 과학 개념 및 혁신을 제공할 뿐만 아니라 완벽한 애프터 서비스와 강력한 제품 범위 확장도 제공합니다.
리니어 가이드용 베어링
선형 레일, 슬라이딩 가이드 및 선형 가이드 레일로도 알려진 선형 가이드는 고정밀, 저마찰 선형 운동을 달성하기 위해 기계 부품을 특정 방향으로 안내하는 데 사용되는 장치입니다.

고속 내식성 베어링
고속 베어링은 Dmn 값이 1.0×10⁶ mm·rpm을 초과하는 구름 베어링입니다. 이들의 성능 특성은 평균 직경 Dm과 내부 링의 회전 속도 n의 곱에 의해 결정됩니다. 이는 고정밀 및 고속 애플리케이션용으로 설계되었습니다.

FAG 브랜드 베어링
수입 베어링은 중국산 베어링과 대조되는 개념이다. 수입 베어링은 강력한 브랜드 지원, 첨단 과학 개념 및 혁신을 제공할 뿐만 아니라 완벽한 애프터 서비스와 강력한 제품 범위 확장도 제공합니다.

자동차 베어링 - 클러치 릴리스 베어링
자동차의 클러치 릴리스 베어링은 자동차 변속기의 핵심 구성 요소입니다. 클러치와 변속기 사이에 설치되며, 릴리스 레버의 회전 및 축 운동을 조정하여 클러치의 원활한 결합 및 분리를 보장하고 마모를 줄이고 변속기 수명을 연장합니다.

NSK 브랜드 베어링
수입 베어링은 중국산 베어링과 대조되는 개념이다. 수입 베어링은 강력한 브랜드 지원, 첨단 과학 개념 및 혁신을 제공할 뿐만 아니라 완벽한 애프터 서비스와 강력한 제품 범위 확장도 제공합니다.


야금 압연 공장용 베어링
롤 베어링은 야금 압연기 베어링의 또 다른 이름입니다. 이는 밀 롤을 지지하고 스탠드의 올바른 위치에 유지하도록 설계된 핵심 구성 요소입니다. 롤 베어링은 크게 플레인 베어링과 롤링 베어링으로 구분되며, 저마찰, 고강도, 적당한 강성의 특성을 갖추어야 합니다.

질화규소 볼이 포함된 세라믹 베어링
세라믹 볼 베어링은 전동체가 세라믹 소재인 산업용 베어링입니다. 그들은 일반적으로 세라믹 볼(열간 압착된 질화규소 Si₃N₄ 또는 이산화지르코늄)과 금속 링의 결합 디자인을 사용합니다.

스테인레스 스틸 베어링
기존 베어링과 비교하여 스테인리스 스틸 베어링은 재료 측면뿐만 아니라 기술 및 정밀 제어 측면에서도 확실한 이점을 가지고 있습니다. 이에 대한 요구 사항은 기존 베어링보다 훨씬 엄격합니다. 작동 중에 스테인레스 스틸 베어링은 안정적으로 작동하고 소음이 적으며 부식에 강하고 널리 사용됩니다.

자동차 베어링-기어박스 베어링
변속기 베어링은 자동차 변속기의 핵심 기계 부품으로, 회전 샤프트를 지지하고 마찰을 줄이도록 설계되었습니다. 손상되면 소음, 온도 상승, 중립 기어에서 외부 소리 등의 증상이 나타나므로 시기 적절한 수리 및 교체가 필요합니다.